Note
Go to the end to download the full example code.
Layer Normalization
In this tutorial, you will write a high-performance layer normalization kernel that runs faster than the PyTorch implementation.
In doing so, you will learn about:
Implementing backward pass in Triton.
Implementing parallel reduction in Triton.
Motivations
The LayerNorm operator was first introduced in [BA2016] as a way to improve the performance of sequential models (e.g., Transformers) or neural networks with small batch size. It takes a vector \(x\) as input and produces a vector \(y\) of the same shape as output. The normalization is performed by subtracting the mean and dividing by the standard deviation of \(x\). After the normalization, a learnable linear transformation with weights \(w\) and biases \(b\) is applied. The forward pass can be expressed as follows:
where \(\epsilon\) is a small constant added to the denominator for numerical stability. Let’s first take a look at the forward pass implementation.
import torch
import triton
import triton.language as tl
try:
# This is https://github.com/NVIDIA/apex, NOT the apex on PyPi, so it
# should not be added to extras_require in setup.py.
import apex
HAS_APEX = True
except ModuleNotFoundError:
HAS_APEX = False
DEVICE = triton.runtime.driver.active.get_active_torch_device()
@triton.jit
def _layer_norm_fwd_fused(
X, # pointer to the input
Y, # pointer to the output
W, # pointer to the weights
B, # pointer to the biases
Mean, # pointer to the mean
Rstd, # pointer to the 1/std
stride, # how much to increase the pointer when moving by 1 row
N, # number of columns in X
eps, # epsilon to avoid division by zero
BLOCK_SIZE: tl.constexpr,
):
# Map the program id to the row of X and Y it should compute.
row = tl.program_id(0)
Y += row * stride
X += row * stride
# Compute mean
mean = 0
_mean = tl.zeros([BLOCK_SIZE], dtype=tl.float32)
for off in range(0, N, BLOCK_SIZE):
cols = off + tl.arange(0, BLOCK_SIZE)
a = tl.load(X + cols, mask=cols < N, other=0.).to(tl.float32)
_mean += a
mean = tl.sum(_mean, axis=0) / N
# Compute variance
_var = tl.zeros([BLOCK_SIZE], dtype=tl.float32)
for off in range(0, N, BLOCK_SIZE):
cols = off + tl.arange(0, BLOCK_SIZE)
x = tl.load(X + cols, mask=cols < N, other=0.).to(tl.float32)
x = tl.where(cols < N, x - mean, 0.)
_var += x * x
var = tl.sum(_var, axis=0) / N
rstd = 1 / tl.sqrt(var + eps)
# Write mean / rstd
tl.store(Mean + row, mean)
tl.store(Rstd + row, rstd)
# Normalize and apply linear transformation
for off in range(0, N, BLOCK_SIZE):
cols = off + tl.arange(0, BLOCK_SIZE)
mask = cols < N
w = tl.load(W + cols, mask=mask)
b = tl.load(B + cols, mask=mask)
x = tl.load(X + cols, mask=mask, other=0.).to(tl.float32)
x_hat = (x - mean) * rstd
y = x_hat * w + b
# Write output
tl.store(Y + cols, y, mask=mask)
Backward pass
The backward pass for the layer normalization operator is a bit more involved than the forward pass. Let \(\hat{x}\) be the normalized inputs \(\frac{ x - \text{E}[x] }{ \sqrt{\text{Var}(x) + \epsilon} }\) before the linear transformation, the Vector-Jacobian Products (VJP) \(\nabla_{x}\) of \(x\) are given by:
where \(\odot\) denotes the element-wise multiplication, \(\cdot\) denotes the dot product, and \(\sigma\) is the standard deviation. \(c_1\) and \(c_2\) are intermediate constants that improve the readability of the following implementation.
For the weights \(w\) and biases \(b\), the VJPs \(\nabla_{w}\) and \(\nabla_{b}\) are more straightforward:
Since the same weights \(w\) and biases \(b\) are used for all rows in the same batch, their gradients need to sum up. To perform this step efficiently, we use a parallel reduction strategy: each kernel instance accumulates partial \(\nabla_{w}\) and \(\nabla_{b}\) across certain rows into one of \(\text{GROUP\_SIZE\_M}\) independent buffers. These buffers stay in the L2 cache and then are further reduced by another function to compute the actual \(\nabla_{w}\) and \(\nabla_{b}\).
Let the number of input rows \(M = 4\) and \(\text{GROUP\_SIZE\_M} = 2\), here’s a diagram of the parallel reduction strategy for \(\nabla_{w}\) (\(\nabla_{b}\) is omitted for brevity):
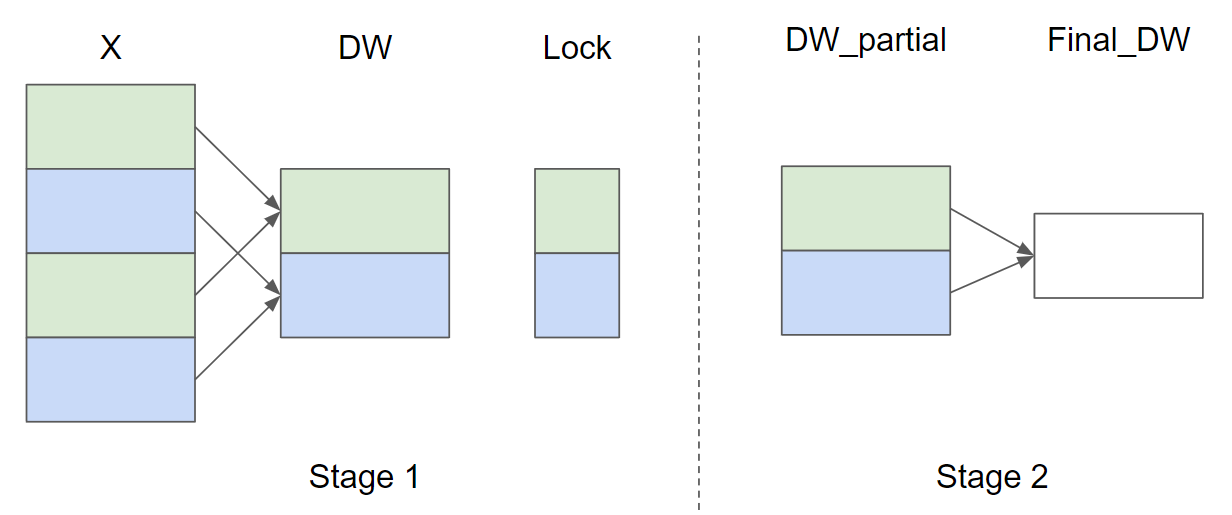
In Stage 1, the rows of X that have the same color share the same buffer and thus a lock is used to ensure that only one kernel instance writes to the buffer at a time.
In Stage 2, the buffers are further reduced to compute the final \(\nabla_{w}\) and \(\nabla_{b}\).
In the following implementation, Stage 1 is implemented by the function _layer_norm_bwd_dx_fused and Stage 2 is implemented by the function _layer_norm_bwd_dwdb.
@triton.jit
def _layer_norm_bwd_dx_fused(DX, # pointer to the input gradient
DY, # pointer to the output gradient
DW, # pointer to the partial sum of weights gradient
DB, # pointer to the partial sum of biases gradient
X, # pointer to the input
W, # pointer to the weights
Mean, # pointer to the mean
Rstd, # pointer to the 1/std
Lock, # pointer to the lock
stride, # how much to increase the pointer when moving by 1 row
N, # number of columns in X
GROUP_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr):
# Map the program id to the elements of X, DX, and DY it should compute.
row = tl.program_id(0)
cols = tl.arange(0, BLOCK_SIZE_N)
mask = cols < N
X += row * stride
DY += row * stride
DX += row * stride
# Offset locks and weights/biases gradient pointer for parallel reduction
lock_id = row % GROUP_SIZE_M
Lock += lock_id
Count = Lock + GROUP_SIZE_M
DW = DW + lock_id * N + cols
DB = DB + lock_id * N + cols
# Load data to SRAM
x = tl.load(X + cols, mask=mask, other=0).to(tl.float32)
dy = tl.load(DY + cols, mask=mask, other=0).to(tl.float32)
w = tl.load(W + cols, mask=mask).to(tl.float32)
mean = tl.load(Mean + row)
rstd = tl.load(Rstd + row)
# Compute dx
xhat = (x - mean) * rstd
wdy = w * dy
xhat = tl.where(mask, xhat, 0.)
wdy = tl.where(mask, wdy, 0.)
c1 = tl.sum(xhat * wdy, axis=0) / N
c2 = tl.sum(wdy, axis=0) / N
dx = (wdy - (xhat * c1 + c2)) * rstd
# Write dx
tl.store(DX + cols, dx, mask=mask)
# Accumulate partial sums for dw/db
partial_dw = (dy * xhat).to(w.dtype)
partial_db = (dy).to(w.dtype)
while tl.atomic_cas(Lock, 0, 1) == 1:
pass
count = tl.load(Count)
# First store doesn't accumulate
if count == 0:
tl.atomic_xchg(Count, 1)
else:
partial_dw += tl.load(DW, mask=mask)
partial_db += tl.load(DB, mask=mask)
tl.store(DW, partial_dw, mask=mask)
tl.store(DB, partial_db, mask=mask)
# need a barrier to ensure all threads finished before
# releasing the lock
tl.debug_barrier()
# Release the lock
tl.atomic_xchg(Lock, 0)
@triton.jit
def _layer_norm_bwd_dwdb(DW, # pointer to the partial sum of weights gradient
DB, # pointer to the partial sum of biases gradient
FINAL_DW, # pointer to the weights gradient
FINAL_DB, # pointer to the biases gradient
M, # GROUP_SIZE_M
N, # number of columns
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr):
# Map the program id to the elements of DW and DB it should compute.
pid = tl.program_id(0)
cols = pid * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)
dw = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
db = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
# Iterate through the rows of DW and DB to sum the partial sums.
for i in range(0, M, BLOCK_SIZE_M):
rows = i + tl.arange(0, BLOCK_SIZE_M)
mask = (rows[:, None] < M) & (cols[None, :] < N)
offs = rows[:, None] * N + cols[None, :]
dw += tl.load(DW + offs, mask=mask, other=0.)
db += tl.load(DB + offs, mask=mask, other=0.)
# Write the final sum to the output.
sum_dw = tl.sum(dw, axis=0)
sum_db = tl.sum(db, axis=0)
tl.store(FINAL_DW + cols, sum_dw, mask=cols < N)
tl.store(FINAL_DB + cols, sum_db, mask=cols < N)
Benchmark
We can now compare the performance of our kernel against that of PyTorch.
Here we focus on inputs that have Less than 64KB per feature.
Specifically, one can set 'mode': 'backward' to benchmark the backward pass.
class LayerNorm(torch.autograd.Function):
@staticmethod
def forward(ctx, x, normalized_shape, weight, bias, eps):
# allocate output
y = torch.empty_like(x)
# reshape input data into 2D tensor
x_arg = x.reshape(-1, x.shape[-1])
M, N = x_arg.shape
mean = torch.empty((M, ), dtype=torch.float32, device=x.device)
rstd = torch.empty((M, ), dtype=torch.float32, device=x.device)
# Less than 64KB per feature: enqueue fused kernel
MAX_FUSED_SIZE = 65536 // x.element_size()
BLOCK_SIZE = min(MAX_FUSED_SIZE, triton.next_power_of_2(N))
if N > BLOCK_SIZE:
raise RuntimeError("This layer norm doesn't support feature dim >= 64KB.")
# heuristics for number of warps
num_warps = min(max(BLOCK_SIZE // 256, 1), 8)
# enqueue kernel
_layer_norm_fwd_fused[(M, )]( #
x_arg, y, weight, bias, mean, rstd, #
x_arg.stride(0), N, eps, #
BLOCK_SIZE=BLOCK_SIZE, num_warps=num_warps, num_ctas=1)
ctx.save_for_backward(x, weight, bias, mean, rstd)
ctx.BLOCK_SIZE = BLOCK_SIZE
ctx.num_warps = num_warps
ctx.eps = eps
return y
@staticmethod
def backward(ctx, dy):
x, w, b, m, v = ctx.saved_tensors
# heuristics for amount of parallel reduction stream for DW/DB
N = w.shape[0]
GROUP_SIZE_M = 64
if N <= 8192: GROUP_SIZE_M = 96
if N <= 4096: GROUP_SIZE_M = 128
if N <= 1024: GROUP_SIZE_M = 256
# allocate output
locks = torch.zeros(2 * GROUP_SIZE_M, dtype=torch.int32, device=w.device)
_dw = torch.zeros((GROUP_SIZE_M, N), dtype=x.dtype, device=w.device)
_db = torch.zeros((GROUP_SIZE_M, N), dtype=x.dtype, device=w.device)
dw = torch.empty((N, ), dtype=w.dtype, device=w.device)
db = torch.empty((N, ), dtype=w.dtype, device=w.device)
dx = torch.empty_like(dy)
# enqueue kernel using forward pass heuristics
# also compute partial sums for DW and DB
x_arg = x.reshape(-1, x.shape[-1])
M, N = x_arg.shape
_layer_norm_bwd_dx_fused[(M, )]( #
dx, dy, _dw, _db, x, w, m, v, locks, #
x_arg.stride(0), N, #
BLOCK_SIZE_N=ctx.BLOCK_SIZE, #
GROUP_SIZE_M=GROUP_SIZE_M, #
num_warps=ctx.num_warps)
grid = lambda meta: (triton.cdiv(N, meta['BLOCK_SIZE_N']), )
# accumulate partial sums in separate kernel
_layer_norm_bwd_dwdb[grid](
_dw, _db, dw, db, min(GROUP_SIZE_M, M), N, #
BLOCK_SIZE_M=32, #
BLOCK_SIZE_N=128, num_ctas=1)
return dx, None, dw, db, None
layer_norm = LayerNorm.apply
def test_layer_norm(M, N, dtype, eps=1e-5, device=DEVICE):
# create data
x_shape = (M, N)
w_shape = (x_shape[-1], )
weight = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
bias = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
x = -2.3 + 0.5 * torch.randn(x_shape, dtype=dtype, device=device)
dy = .1 * torch.randn_like(x)
x.requires_grad_(True)
# forward pass
y_tri = layer_norm(x, w_shape, weight, bias, eps)
y_ref = torch.nn.functional.layer_norm(x, w_shape, weight, bias, eps).to(dtype)
# backward pass (triton)
y_tri.backward(dy, retain_graph=True)
dx_tri, dw_tri, db_tri = [_.grad.clone() for _ in [x, weight, bias]]
x.grad, weight.grad, bias.grad = None, None, None
# backward pass (torch)
y_ref.backward(dy, retain_graph=True)
dx_ref, dw_ref, db_ref = [_.grad.clone() for _ in [x, weight, bias]]
# compare
assert torch.allclose(y_tri, y_ref, atol=1e-2, rtol=0)
assert torch.allclose(dx_tri, dx_ref, atol=1e-2, rtol=0)
assert torch.allclose(db_tri, db_ref, atol=1e-2, rtol=0)
assert torch.allclose(dw_tri, dw_ref, atol=1e-2, rtol=0)
@triton.testing.perf_report(
triton.testing.Benchmark(
x_names=['N'],
x_vals=[512 * i for i in range(2, 32)],
line_arg='provider',
line_vals=['triton', 'torch'] + (['apex'] if HAS_APEX else []),
line_names=['Triton', 'Torch'] + (['Apex'] if HAS_APEX else []),
styles=[('blue', '-'), ('green', '-'), ('orange', '-')],
ylabel='GB/s',
plot_name='layer-norm-backward',
args={'M': 4096, 'dtype': torch.float16, 'mode': 'backward'},
))
def bench_layer_norm(M, N, dtype, provider, mode='backward', eps=1e-5, device=DEVICE):
# create data
x_shape = (M, N)
w_shape = (x_shape[-1], )
weight = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
bias = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
x = -2.3 + 0.5 * torch.randn(x_shape, dtype=dtype, device=device)
dy = .1 * torch.randn_like(x)
x.requires_grad_(True)
quantiles = [0.5, 0.2, 0.8]
def y_fwd():
if provider == "triton":
return layer_norm(x, w_shape, weight, bias, eps) # noqa: F811, E704
if provider == "torch":
return torch.nn.functional.layer_norm(x, w_shape, weight, bias, eps) # noqa: F811, E704
if provider == "apex":
apex_layer_norm = (apex.normalization.FusedLayerNorm(w_shape).to(x.device).to(x.dtype))
return apex_layer_norm(x) # noqa: F811, E704
# forward pass
if mode == 'forward':
gbps = lambda ms: 2 * x.numel() * x.element_size() * 1e-9 / (ms * 1e-3)
ms, min_ms, max_ms = triton.testing.do_bench(y_fwd, quantiles=quantiles, rep=500)
# backward pass
if mode == 'backward':
y = y_fwd()
gbps = lambda ms: 3 * x.numel() * x.element_size() * 1e-9 / (ms * 1e-3) # noqa: F811, E704
ms, min_ms, max_ms = triton.testing.do_bench(lambda: y.backward(dy, retain_graph=True), quantiles=quantiles,
grad_to_none=[x], rep=500)
return gbps(ms), gbps(max_ms), gbps(min_ms)
test_layer_norm(1151, 8192, torch.float16)
bench_layer_norm.run(save_path='.', print_data=True)
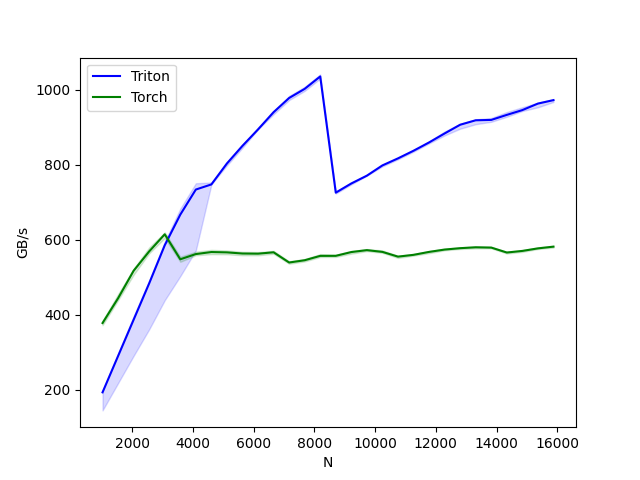
layer-norm-backward:
N Triton (GB/s) Torch (GB/s)
0 1024.0 109.226669 378.092307
1 1536.0 160.978168 444.144584
2 2048.0 215.578943 511.999982
3 2560.0 273.066671 558.545450
4 3072.0 338.201833 580.535403
5 3584.0 380.601764 515.065851
6 4096.0 433.057275 522.893602
7 4608.0 455.111107 529.148312
8 5120.0 509.875515 543.716805
9 5632.0 556.246908 553.967224
10 6144.0 606.814809 562.809189
11 6656.0 657.382710 572.559140
12 7168.0 735.179467 547.872604
13 7680.0 740.240951 555.180730
14 8192.0 771.011790 564.965515
15 8704.0 684.904931 567.652161
16 9216.0 739.745803 577.503907
17 9728.0 760.495091 579.334969
18 10240.0 780.190446 572.867124
19 10752.0 774.918911 564.656471
20 11264.0 799.810621 569.128411
21 11776.0 843.653757 574.439000
22 12288.0 869.946926 582.830027
23 12800.0 890.434763 585.142878
24 13312.0 882.563556 587.294107
25 13824.0 889.479921 589.300199
26 14336.0 910.222229 573.439973
27 14848.0 945.230796 580.377833
28 15360.0 962.506512 587.006361
29 15872.0 935.941000 587.851864
References
Jimmy Lei Ba and Jamie Ryan Kiros and Geoffrey E. Hinton, “Layer Normalization”, Arxiv 2016
Total running time of the script: (0 minutes 28.358 seconds)